The variation in complexity for each task is discussed as follows:
- VCOP: We increase the number of clips from 3 to 5. With these variations, the number of permutations increase from 6 to 120 which increases the memory as well as compute cost for VCOP. We reduce the batch-size by a factor of 2 as we go from 3-5 to limit the memory consumption.
- RotNet: We fluctuate the number of times clips are rotated along the spatial axis for three cases: 2, 3 and 4 rotations. The videos are rotated in multiple of 90 degrees.
- PRP: We investigate different sampling rates for this pretext task. The dilation sampling rates are 1, 2, 4 and 8. Depending upon the types of sample steps in the list, we have a class label assigned to each sample step. The sample rate of clip is classified ranging from 2 classes for {1, 2} to 4 classes which includes all sampling rates {1, 2, 4, 8}.
- training with a more complex problem doesn't always lead to optimal solutions.
- CKA maps show that increasing complexity of the problem is indicative of saturation in performance as block structures begin to emerge.
Table 1: Complexity Variation:TC: Task complexity. Results are shown on UCF101 with ShuffleNet/R21D backbone.
From Table 1, we see increasing the number of rotations in RotNet from three to four makes the task too complex for the network and there’s a sharp decrease in performance (more than 10% in case of R21D). In case of VCOP, we see that 3 clips permutation leads to better solution than other settings by a margin 2- 3%. For PRP, small capacity networks are unable to generalize well with increase in complexity as compared to bigger capacity network.
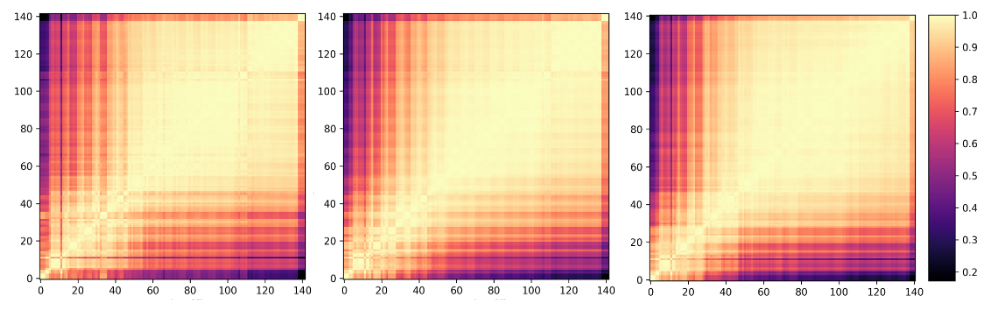
Figure 1: CKA maps for layer representations: Complexity 2,3,4 for RotNet pretext, Network: ShuffleNet (Left to right).
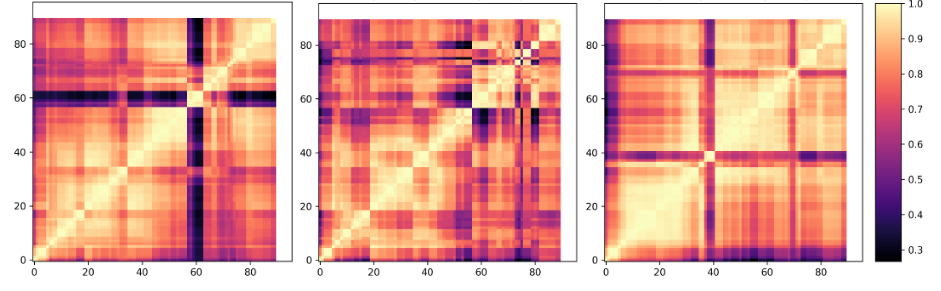
Figure 2: CKA maps for layer representations: Complexity 2,3,4 for RotNet pretext, Network: R21D (Left to right).
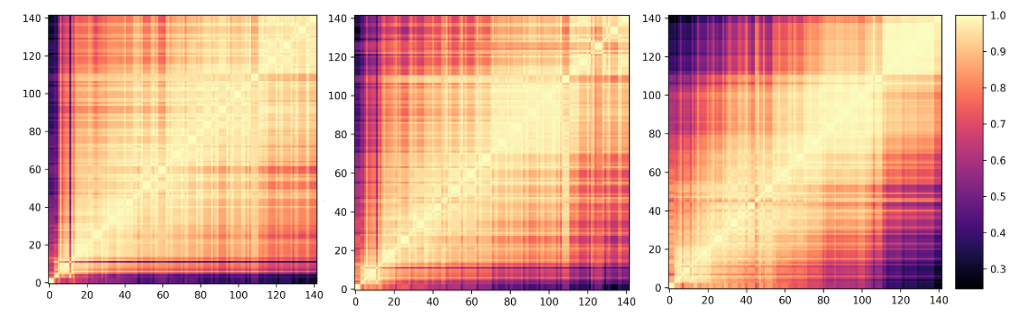
Figure 3: CKA maps for layer representations: Complexity 2,3,4 for PRP pretext, Network: ShuffleNet (Left to right).
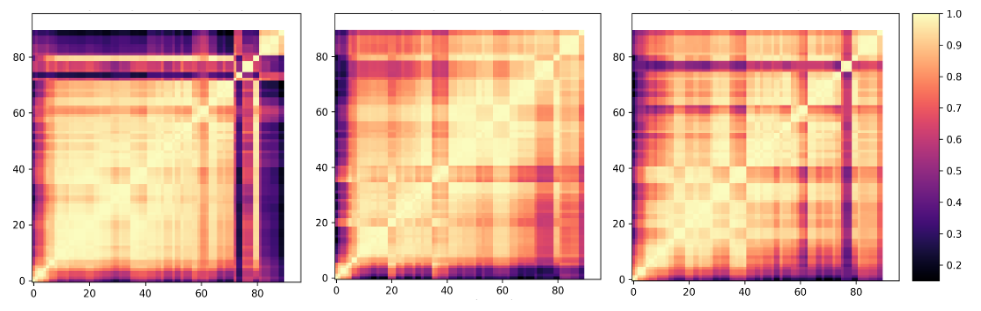
Figure 4: CKA maps for layer representations: Complexity 2,3,4 for PRP pretext, Network: R21D (Left to right).
In case of RotNet, both networks show staggering grids for complexity with 3 rotations. As we increase the complexity, multi-block pattern gets more prominent which indicates the saturation in performance. For PRP, ShuffleNet has an overall lower performance in comparison to R21D, and, hence we see a multi-block patterns for different complexities, giving the darkest pattern when increased from 3 to 4. On the other hand, R21D depicts staggering grids for both these complexities